|
|
|
|
| <<Volver atrás |
|
Las conexiones de la controladora LEGO son:
Todas estas conexiones se encuentran en el RCX, a excepción del conector DB-9 macho que está en el Transmisor de Infrarrojos (IR) que permite establecer la comunicación entre el ordenador y la controladora alojada en el RCX. Entre los diferentes tipos de conexiones hay que tener en cuenta una serie de observaciones, que son las que se muestran a continuación:
Para comprobar que la controladora funciona correctamente, conviene tener en cuenta las siguientes observaciones: §Antes de bajar el firmware (el software necesario para controlar el RCX) la pantalla de visualización del RCX sólo mostrará la figura del hombrecillo y el nº de programa, el botón View y el reloj del Software no funcionarán. §Una vez se haya bajado el fimware del ordenador todas las funciones del RCX estarán activas. Para realizar esta operación consulte la sección Software Robolab > Descripción del software > Administrador > Pestaña Administrador > Probar comunicación del RCX. Si no se cumplen estas 2 premisas, el RCX no funcionará correctamente. Si ha intentado bajar el firmware al RCX y no le ha sido posible, es posible que la comunicación con el RCX sea incorrecta. Compruebe que el puerto serie del PC al que está conectado el Transmisor de Infrarrojos es el correcto. Para ello, consulte la sección Software Robolab > Descripción del software > Administrador > Pestaña Administrador > Seleccionar Puerto COM de esta documentación. Una vez seleccionado el puerto, compruebe la comunicación. Consulte la sección Software Robolab > Descripción del software > Administrador > Pestaña Administrador > Probar comunicación del RCX. 2.3 Aplicaciones básicas:A la hora de realizar las aplicaciones básicas para comprobar el correcto funcionamiento de la controladora, necesitaremos los siguientes dispositivos, aparte del RCX y del TI.
Sensor de luz Sensor de contacto
Motor Lámpara 2.3.1 Encender una bombillaPara poder realizar esta práctica necesitaremos los siguientes materiales:
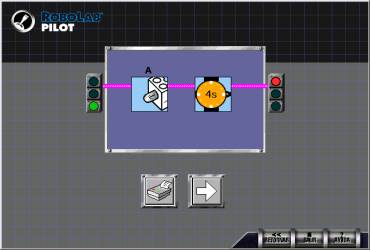
Si necesita más información en alguno de los puntos explicados a continuación, recurra al apartado Software Robolab > Descripción del software > Programador de esta documentación. Los pasos a seguir para realizar esta práctica son: Conectar la lámpara mediante un adaptador especial al puerto de salida A. Una vez conectada físicamente la lámpara, habrá que programar el RCX en el software Robolab para poder encender la lámpara. Dentro del software Robolab, accedemos al nivel Programador - Pilot 1. En este nivel de programación elegiremos la lámpara escogiendo el tiempo que queremos que esté encendida.
Una vez programado la operación a realizar se pincha con el ratón sobre el icono de la flecha para bajar el programa del ordenador al RCX. Finalizada la bajada del programa, se pulsará el botón Run del RCX para que la operación a realizar se inicie. A continuación se muestra una imagen de esta práctica:
Para poder realizar esta práctica necesitaremos los siguientes materiales:
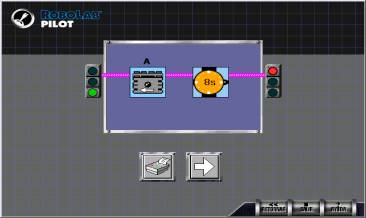
Si necesita más información en alguno de los puntos explicados a continuación, recurra al apartado Software Robolab > Descripción del software > Programador de esta documentación. Los pasos a seguir para realizar esta práctica son: Conectar un motor mediante un adaptador especial al puerto de salida A. Una vez conectado físicamente el motor, habrá que programar el RCX en el software Robolab para poder controlar el motor. Dentro del software Robolab, accedemos al nivel Programador - Pilot 1. En este nivel de programación elegiremos el sentido de giro del motor (hacia delante o hacia atrás) y escogemos el tiempo que queremos que esté encendido.
Una vez programada la operación a realizar se pincha con el ratón sobre el icono de la flecha para bajar el programa del ordenador al RCX. Finalizada la bajada del programa, se pulsará el botón Run del RCX para que la operación a realizar se inicie. A continuación mostramos una imagen de esta práctica:
|
|||
|