|
|
|
|
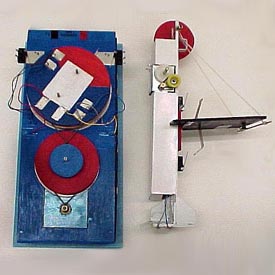
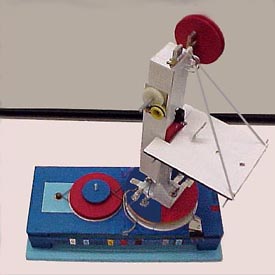
CONSTRUCCIÓN Este dispositivo simula una plataforma de visión mediante videocámara como las que nos podemos encontrar en las esquinas de los edificios oficiales, o las que actualmente se están colocando por las calles para el control del tráfico y de la seguridad. La observación puede hacerse en distintas direcciones: mirar hacia arriba y hacia abajo con un ángulo aproximado de 45º en ambos sentidos y; de forma lateral, hacia izquierda y derecha con un ángulo de 60º. El sistema se apoya para su funcionamiento en la integración de una minicámara de videoconferencia, más conocida como webcam, sobre una plataforma móvil que permite su posicionamiento en dos ejes llamados de cabeceo y de guiñada, es decir, permiten la variación del campo de visión de arriba abajo y de izquierda a derecha. Se ha construido un sistema formado por dos motores: uno que realiza el movimiento de subir y bajar una plataforma móvil situada en una columna y el otro que la hace moverse hacia la izquierda y derecha a la columna. Ambos movimientos tienen, al final de su recorrido, dos sensores, llamados finales de etapa que posibilitan el cambio de giro en los motores.
Todo el conjunto será manejado por la Tarjeta de Control, acoplada al ordenador, de modo que éste mande las señales correspondientes para mover el sistema y genere los movimientos alternativos de subida, bajada hacia la izquierda y derecha, mediante las señales generadas por unos sensores. PLATAFORMA DE ELEMENTOS Y CABLEADOS Es el lugar donde se van a ubicar todos los operadores, conexiones y dispositivos del sistema. Se compone de dos plataformas: una, de madera de contrachapado de 28 X 15 cm (ver dibujo 2), donde se colocan todos ellos; y otra de aglomerado de 30 X 20 cm que da solidez al conjunto. Ambas están unidas por cuatro patas mediante tornillos. En su construcción se pueden observar los siguientes elementos: Regleta de colores de cableado: nos indica los colores de cable que hemos empleado a la hora de realizar las conexiones eléctricas: Encima de estos colores se han colocado unos contactos de hojalata para introducir sendas pinzas metálicas (del pelo), lugares donde se realizarán las conexiones a la controladora. Sensores E7 y E8: colocados en la parte delantera de la plataforma de contrachapado, nos permiten los cambios de giro horizontal de izquierda a derecha y viceversa. Clavitos para conexiones a los sensores superiores: se han colocado cuatro clavitos donde hemos de estañar en la cabeza de ellos los cables correspondientes a los sensores E4 y E3 que proceden de los contactos de la polea de movimiento vertical.
Chapa para conexión al motor 2 (superior): en esta chapa se ha de estañar uno de los cables que proceden de este motor. Al mismo tiempo, desde esta chapa se estaña un cable (por la parte inferior de la plataforma - dibujo 2) a una de las conexiones del motor superior 2, en el contacto del color amarillo (S3). Motor con reductora: Por la parte inferior de la plataforma de contrachapado se ha colocado este motor de modo que asome su eje por un orificio que se ha realizado en ella. Sus cables se estañan a las conexiones del motor 1, S1 (blanco) y S2 (azul). Ubicación de la polea reductora: con el fin de ralentizar el movimiento de giro, se coloca una polea en este lugar (ver su construcción en dibujo 5). Ubicación de la polea de giro horizontal: En este lugar se sitúa dicha polea. Se puede observar que en su parte central lleva un orificio por donde se introducirá el tornillo que esta polea lleva por la parte inferior y quedará fija a la plataforma mediante una turca de mariposa (ver dibujo 3). En el dibujo 2 (Plataforma de elementos vista por la parte inferior) se pueden observar algunos de los elementos que hemos mencionado en los distintos apartados, así como el cableado de la plataforma.
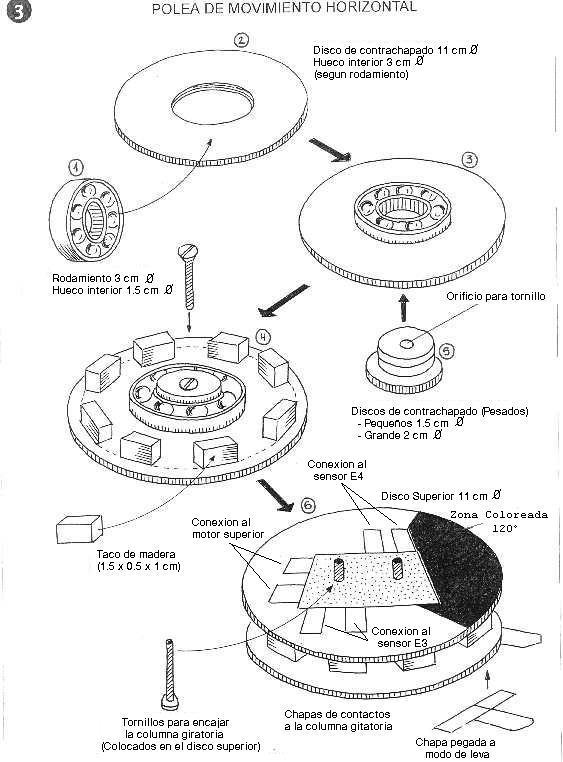
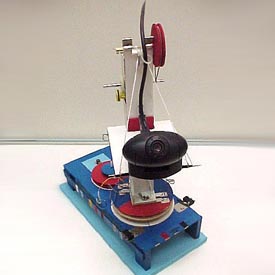
POLEA DE MOVIMIENTO HORIZONTAL Para la construcción de esta polea hemos de disponer de un rodamiento viejo de unos 3 cm de diámetro exterior y 1,5 de diámetro interior.
Este rodamiento lo encajamos en un disco de contrachapado de unos 11 cm de diámetro al que hemos realizado un orificio central de 3 cm de diámetro. Una vez encajado en el orificio central del disco anterior, se deja bien fijo con un poco de pegamento fuerte. En el hueco del rodamiento encajamos y pegamos unos discos de madera a modo de tapón. En la parte central de esta especie de tapón lleva un orificio por donde se introducirá un tornillo. Alrededor del disco de madera pegamos unos taquitos de madera. El disco superior (de madera de contrachapado y de 11 cm de diámetro) lleva dos tornillos donde se encajará la columna giratoria, sobre él se han pegado unas chapas que harán contacto con los cables procedentes del motor superior y de los sensores E3 y E4. Esta polea lleva, en su parte inferior, una especie de chapita a modo de leva que servirá para activar los sensores E1 y E2.
Con el fin de ralentizar el movimiento de giro de la columna giratoria, se ha incorporado al sistema una polea reductora construida con cinco discos de madera de contrachapado y un palito hueco de caramelo que hace de eje introducido a presión en la parte central de dichos discos.
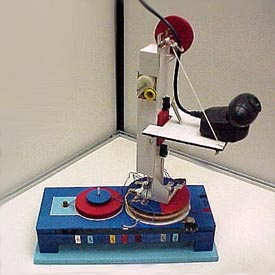
Consta de los siguientes elementos: Tablilla vertical: sobre ella se situarán los diversos operadores. Tiene unas dimensiones de 23 X 4 cm. En la parte superior se ha realizado un corte que dará libertad a la fijación del cordón que tira de la plataforma móvil. Tablilla soporte: la tablilla anterior se ha pegado a otra que tiene unos orificios para fijar a la polea de movimiento horizontal. En su base se han pegado unas chapitas a las que se estañarán los cables procedentes del motor superior y de los sensores E3 y E4. El conjunto queda consolidado con dos escuadras pegadas en su base. Polea: en la parte superior de la tablilla vertical, lleva colocada una polea con eje solidario de alambre, que gira en dos chapitas pegadas en los laterales del corte. Motorcillo: se ha colocado un motorcillo con reductora para ralentizar el movimiento. Los cables de este motorcillo se estañan a las chapas delanteras que están pegadas a la base. Sensores: estos sensores E3 y E4 van pegados a la tablilla vertical introduciendo sus contactos por unos orificios que se han realizado. Sus cables se estañan a las chapas laterales pegadas a la base. Orificios de acoplamiento de la plataforma móvil: en la parte central de la tablilla vertical se han realizado dos orificios por donde deben pasar unos tornillos. En la parte trasera de dichos orificios se han pegado dos tuercas a fin de que los tornillos puedan enroscar. Alambre guía del cordón: en la parte superior se ha colocado un alambre con una forma determinada a fin de que el cordón de tiro, al enrollarse en el eje, lo haga de una forma orientada. Correa de transmisión: entre el eje del motor y la polea se ha colocado una correa de transmisión de tipo muelle. En el eje del motor se ha de dar media vuelta a la correa para que agarre mejor. Cubiertas de cartón: para dar un aspecto más estético al conjunto, se han pegado dos perfiles de cartón a la tablilla horizontal. En el dibujo 7 se puede observar el cableado que se ha realizado entre el motor y los sensores con las chapas contacto colocadas en la base del conjunto.
Tablilla fija: tiene unas dimensiones de 5 X 4 cm y lleva pegado en su parte central una chapita a modo de tubito por donde ha de entrar un pasador de alambre. Lleva también dos orificios por donde entrarán sendos tornillos que nos servirán para fijar a la columna giratoria. Tablilla móvil: tiene unas dimensiones de 12 X 10 cm y tiene un corte lateral. A ambos lados de este corte lleva pegadas dos chapitas a modo de tubito, como en la tablilla fija, por donde ha de entrar el pasador. En su otro extremo lleva dos cortes o hendiduras para fijar el cordón de tiro. En su parte central se ha realizado un orificio de 6 mm de diámetro en el que se introduce un tornillo para fijar el visor. También lleva pegadas dos chapas, una en la cara superior y otra en la cara inferior, que nos servirán para presionar en los sensores E3 y E4. Para unir estas dos piezas, de modo que una gire sobre la otra a modo de puerta, se atraviesa un pasador de alambre por las "chapitas tubito" a modo de bisagra.
ACOPLAMIENTO DE LA PLATAFORMA MÓVILPara fijar este conjunto a la columna vertical introducimos y enroscamos dos tornillos por los orificios enfrentados. Para generar el movimiento de esta plataforma hemos de colocar un cordón entre el eje de la polea y las ranuras de dicha plataforma. Este cordón lleva atado en sus extremos un alambre que encaja en las ranuras de dicha plataforma. Al girar la polea en un sentido, el cordón se enrolla en su eje y la plataforma se eleva. Si gira en sentido contrario, se desenrolla y la plataforma desciende.
Para acoplar los elementos construidos hemos de seguir el siguiente orden: - Introducir la correa de transmisión mayor en la polea de movimiento horizontal. - Acoplar la polea de movimiento horizontal: para ello debes introducir el tornillo que asoma por debajo en el orificio de la plataforma y fijarlo con la tuerca de mariposa. - Estañar cables: los cables procedentes de las chapas contacto de la polea de giro horizontal se deben estañar a los contactos del motor o los clavillos de sensores.
- Colocar la correa de transmisión menor entre el eje del motor y la polea reductora. Se debe dar media vuelta a esta correa sobre el eje del motor. - Introducir la correa de transmisión mayor en la polea pequeña de la polea reductora, conviene dar media vuelta a dicha correa. - Acoplamiento de la columna giratoria: para ello debes introducir los tornillos que sobresalen de la polea de movimiento horizontal en los orificios que esta columna tiene en su base. Para dejarla fija debes enroscar unas tuercas de mariposa en dichos tornillos. A la hora de hacer esta operación debes fijarte bien para que las chapas contacto, tanto de la base de la columna como las que están en la polea de movimiento horizontal hagan contacto únicamente, cada una con su homóloga. - Acoplamiento de la plataforma base: para fijar esta plataforma debes introducir y enroscar sendos tornillos en los orificios destinados para ello. - Comprueba, antes de realizar las conexiones a la controladora, que los motores funcionan bien y hacen girar a las poleas realizando unas conexiones de prueba de los contactos de los motores a una pila de petaca.
LA WEBCAM Se ha previsto el acoplamiento de la cámara a la plataforma mediante un tornillo de rosca estándar de idéntico diámetro a las utilizadas en los trípodes de fotografía. Este tipo de cámaras no ofrecen excesiva calidad de imagen, pero sí la suficiente para nuestros propósitos. La conexión de las cámaras a los ordenadores puede realizarse a través de puerto paralelo o mediante USB. También valdría, por supuesto, cualquier cámara conectable a tarjeta capturadora de vídeo, como las Bravado o similares. Los driver de este tipo de dispositivos no suelen estar disponibles para entornos MSDOS, siendo lo más frecuente su instalación en Windows 95 ó 98. Esto nos obligará a disponer de un PC, con los requerimientos de sistema y software ya enunciados para el control de la plataforma, mediante la interfaz de E/S y a disponer de un segundo PC que es el que gestionará la imagen de la webcam. Si estuviéramos trabajando el control sobre equipos con Windows 95 o superior, podríamos optar por agregar al equipo una tarjeta multi I/O, muy económicas en el mercado, con lo que dispondríamos de un segundo puerto paralelo en el que conectar nuestra minicámara y nos ahorraríamos el segundo PC.
La distribución de las imágenes la haríamos a través de un pequeño programa llamado ISPY ( http://www.ispy.nl ) que viene por defecto en multitud de minicámaras, y que recoge una imagen y la envía, vía FTP, de manera periódica al servidor de Internet que le marquemos, en el cual podremos poner una página web que se refresque automáticamente cada cierto tiempo y que tenga incrustada la instantánea que tomemos con la cámara. No es objeto de este apartado el contar en profundidad los entresijos de este programa por lo que remitimos a la lectura de los correspondientes manuales. |
||||||||||||||||||||||||||||||||||||||||||||||