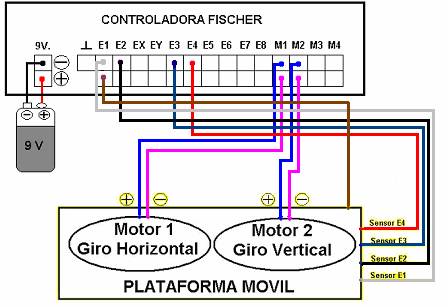
Las conexiones que se establecerán entre la plataforma móvil y la tarjeta controladora Fischer se muestran en la siguiente tabla y en el siguiente esquema.
CONECTOR |
SALIDA DIGITAL |
ENTRADA DIGITAL |
Pila (+) |
9V- (Parte de abajo) |
|
Pila (-) |
9V- (Parte de arriba) |
|
Motor 1 (+) |
M1 (Parte de arriba) |
|
Motor 1 (-) |
M1 (Parte de abajo) |
|
Motor 2 (+) |
M2 (Parte de arriba) |
|
Motor 2 (-) |
M2 (Parte de abajo) |
|
Sensor 1 |
--------------------------- |
E1 (Parte de arriba) |
Sensor 2 |
--------------------------- |
E2 (Parte de arriba) |
Sensor 3 |
--------------------------- |
E3 (Parte de arriba) |
Sensor 4 |
--------------------------- |
E4 (Parte de arriba) |
Masa (sensores) |
--------------------------- |
E1 – E8 (Parte de abajo) |